Samaneh Azargoshasb, Simon van Alphen, Leon J Slof, Giuseppe Rosiello, Stefano Puliatti, Sven I van Leeuwen, Krijn M Houwing, Michael Boonekamp, Jeroen Verhart, Paolo Dell’Oglio, Jos van der Hage, Matthias N van Oosterom, Fijs W B van Leeuwen
- PMID: 34031721
- PMCID: PMC8566398
- DOI: 10.1007/s00259-021-05387-z
Abstract
Purpose: Decision-making and dexterity, features that become increasingly relevant in (robot-assisted) minimally invasive surgery, are considered key components in improving the surgical accuracy. Recently, DROP-IN gamma probes were introduced to facilitate radioguided robotic surgery. We now studied if robotic DROP-IN radioguidance can be further improved using tethered Click-On designs that integrate gamma detection onto the robotic instruments themselves.
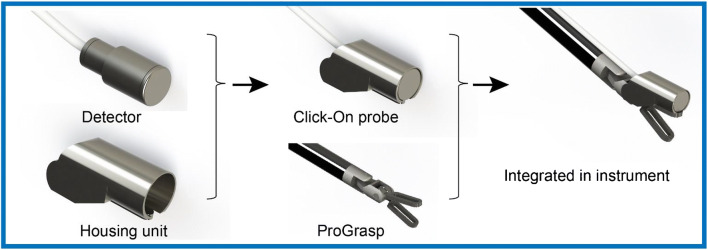
Methods: Using computer-assisted drawing software, 3D printing and precision machining, we created a Click-On probe containing two press-fit connections and an additional grasping moiety for a ProGrasp instrument combined with fiducials that could be video tracked using the Firefly laparoscope. Using a dexterity phantom, the duration of the specific tasks and the path traveled could be compared between use of the Click-On or DROP-IN probe. To study the impact on surgical decision-making, we performed a blinded study, in porcine models, wherein surgeons had to identify a hidden 57Co-source using either palpation or Click-On radioguidance.
Results: When assembled onto a ProGrasp instrument, while preserving grasping function and rotational freedom, the fully functional prototype could be inserted through a 12-mm trocar. In dexterity assessments, the Click-On provided a 40% reduction in movements compared to the DROP-IN, which converted into a reduction in time, path length, and increase in straightness index. Radioguidance also improved decision-making; task-completion rate increased by 60%, procedural time was reduced, and movements became more focused.
Conclusion: The Click-On gamma probe provides a step toward full integration of radioguidance in minimal invasive surgery. The value of this concept was underlined by its impact on surgical dexterity and decision-making.
Keywords: Image-guided surgery; Performance assessment; Precision surgery; Radioguided surgery; Robotic surgery; Surgical training.
© 2021. The Author(s).
Conflict of interest statement
During this research, G.R., S.P., and F.v.L. were (partially) affiliated with ORSI Academy. The authors declare that they have no further conflicts of interest.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}