Stefano Puliatti, Marco Amato, Rui Farinha, Artur Paludo, Giuseppe Rosiello, Ruben De Groote, Andrea Mari, Lorenzo Bianchi, Pietro Piazza, Ben Van Cleynenbreugel, Elio Mazzone, Filippo Migliorini, Saverio Forte, Bernardo Rocco, Patrick Kiely, Alexandre Mottrie, Anthony G Gallagher
- PMID: 34997525
- PMCID: PMC8740863
- DOI: 10.1007/s11548-021-02545-4
Abstract
Purpose: In particular after the onset of the COVID-19 pandemic, there was a precipitous rush to implement virtual and online learning strategies in surgery and medicine. It is essential to understand whether this approach is sufficient and adequate to allow the development of robotic basic surgical skills. The main aim of the authors was to verify if the quality assured eLearning is sufficient to prepare individuals to perform a basic surgical robotic task.
Methods: A prospective, randomized and multi-center study was conducted in September 2020 in the ORSI Academy, International surgical robotic training center. Forty-seven participants, with no experience but a special interest in robotic surgery, were matched and randomized into four groups who underwent a didactic preparation with different formats before carrying out a robotic suturing and anastomosis task. Didactic preparation methods ranged from a complete eLearning path to peer-reviewed published manuscripts describing the suturing, knot tying and task assessment metrics.
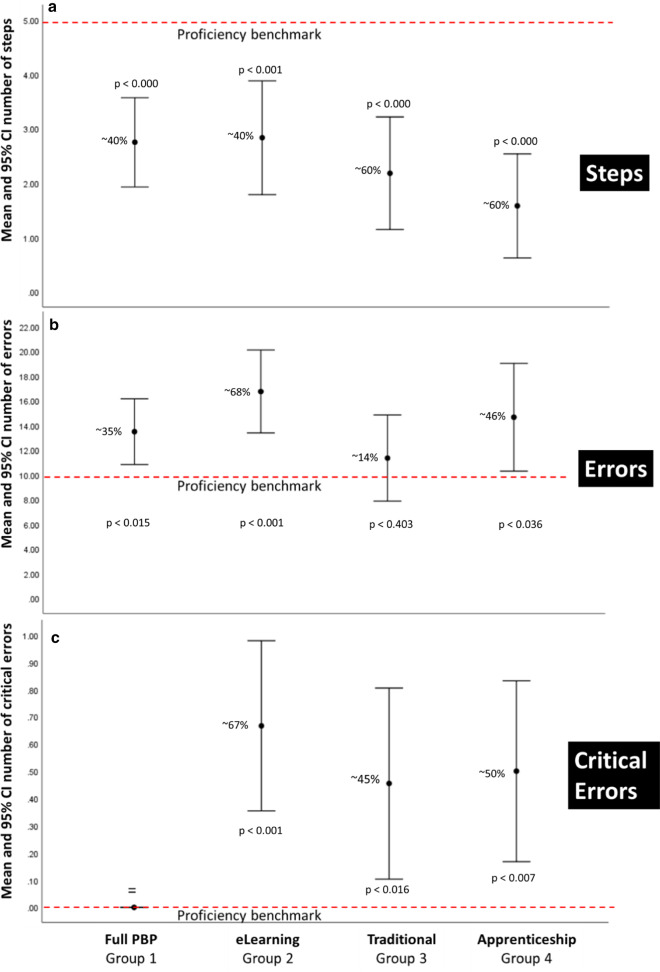
Results: The primary outcome was the percentage of trainees who demonstrated the quantitatively defined proficiency benchmark after learning to complete an assisted but unaided robotic vesico-urethral anastomosis task. The quantitatively defined benchmark was based on the objectively assessed performance (i.e., procedure steps completed, errors and critical errors) of experienced robotic surgeons for a proficiency-based progression (PBP) training course. None of the trainees in this study demonstrated the proficiency benchmarks in completing the robotic surgery task.
Conclusions: PBP-based e-learning methodology is an effective training method avoiding critical errors in the suturing and knotting task. Quality assured online learning is insufficient preparation for robotic suturing and knot tying anastomosis skills.
Trial registration: ClinicalTrials.gov Identifier: NCT04541615.
Keywords: Metrics; Proficiency-based progression; Surgical training; eLearning.
© 2022. CARS.
Conflict of interest statement
The authors declare that they have no conflict of interest.





{kind=link}
{kind=link}